Basketball Robot
Research Group of FutureX Robot, School of Instrumentation and Science, Southeast University.
This project lasted for a year and a half, and the entire robot was built from scratch, of which 90% was my contribution!
Work

This project is to build a robot system with TX2 as the control platform, which is mainly divided into two parts: first, the upper computer part. We use the Ubuntu 20.04 system equipped with ROS noetic robot system to control the robot. We subscribe to cameras through nodes to obtain topics related to external images, and after achieving communication between the upper and lower computers, we transmit information to the lower computers, controlling stm32 to issue corresponding instructions; The second part is the lower computer part, which is mainly composed of an STM32 microcontroller to control the motor, servo, cylinder, and infrared sensor.
In terms of mechanical structure, in order to make the robot motion more stable and reduce uncertainty factors, we replaced the McNumb wheel movement scheme with an omnidirectional wheel structure scheme. On the basis of increasing stability, we achieved accurate control of three degrees of freedom: lateral forward, longitudinal forward, and in situ rotation, facilitating the optimization and improvement of the action route.
On the algorithm side, on the one hand, the global frame is mapped and the local frame is mapped to the global frame through the orthogonal Rotation matrix, so that the robot coordinates can be accurately located. On the other hand, we can recognize the basketball in Opencv through the Hough circle transformation.
1.Designed and built a robot system with ROS as the control platform, which could realize founctions
of sensing obstacles, planning paths, identifying different modes, and completing some mechanical
actions
2.Implemented a multi-layer restricted PID control structure to enable the robot to reach the specified position at the fastest speed
3.Proposed a datagram-based communication mechanism for data interoperability between MCU
(STM32) and high-performance processor (TX2)
4.Researched on a CNN-based method for object detection and fusion with ROS system
By adopting a four omnidirectional wheel architecture and a 90 ° intersecting structure, the robot’s motion is not only more stable, but also achieves the goals of longitudinal forward, lateral translation, and in-situ rotation, achieving accurate control of the robot’s three degrees of freedom travel states and optimizing its travel path.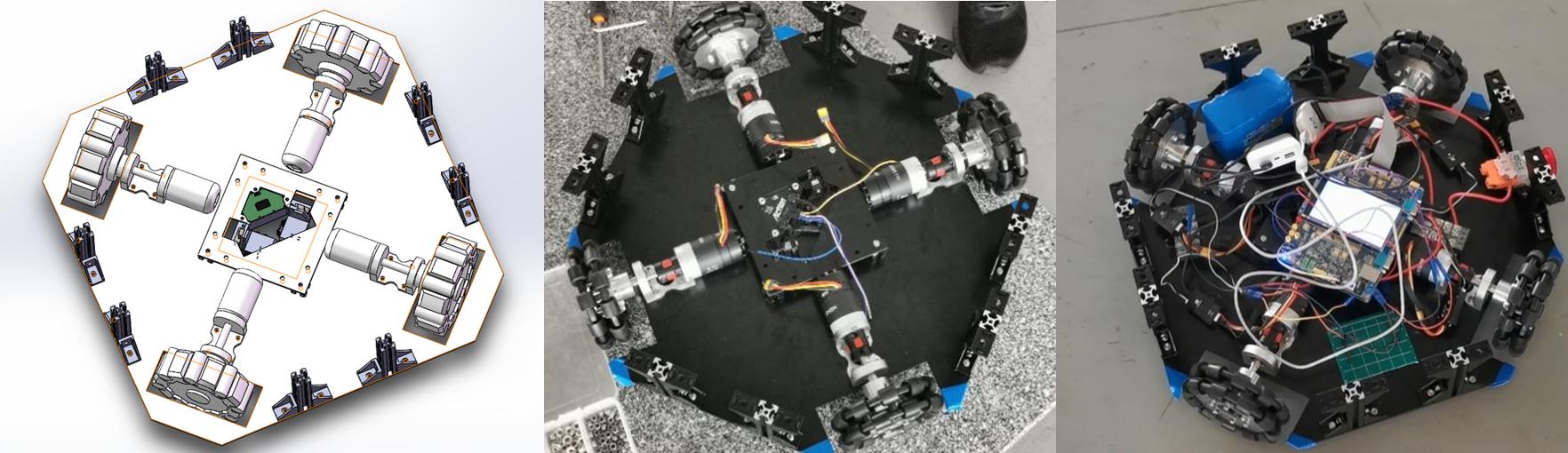
Video
This video is an actual demonstration of the basketball robot
Author: Yue Zhang 张跃
Link: https://kernzhangyue.github.io/2023/06/24/Basketball-Robot/
Copyright: All articles in this blog are licensed under CC BY-NC-SA 3.0 unless stating additionally.